Automatyzacja pracy filtrów otwartych


W chwili obecnej w eksploatacji filtrów otwartych spotyka się następujące rozwiązania sterowania:
-
wspomniane we wstępie ręczne - poprzez przymykanie bądź otwieranie przepustnicy czy zasuwy - w miarę potrzeby, zgodnie z opisanymi sytuacjami
-
automatycznie - przy użyciu odpowiednich urządzeń.

Wadą pierwszego rozwiązania jest konieczność ciągłej obserwacji poziomu wody nad złożem filtracyjnym. Niejednokrotnie dochodzi do niebezpiecznych technologicznie sytuacji związanych z:
-
obniżaniem poziomu lustra wody poniżej złoża filtracyjnego - odsłanianie złoża,
-
nadmiernym napełnianiem komory filtra - czasami do przelewu, co jeśli zostanie stwierdzone przez pracownika wiąże się następnie z gwałtowną korektą (szybkim obniżeniem zwierciadła wody - zrywającym zatrzymane na złożu zawiesiny).
Problemy z ręcznym utrzymaniem odpowiedniego poziomu wody nad złożem filtracyjnym występują zazwyczaj szczególnie intensywnie zaraz po płukaniu filtra, kiedy czyste złoże stawia minimalne opory hydrauliczne w efekcie czego inercja układu sterowania jest nieznaczna (układ od razu reaguje na zmiany - otwarcie, bądź przymknięcie zasuwy, czy przepustnicy). Zabrudzony filtr (złoże zakolmatowane) wolniej "odpowiada" na otwarcie bądź przymknięcie urządzenia regulacyjnego - inercja jest większa.
Dlatego zazwyczaj zdecydowanie więcej czasu na obserwację poziomu wody nad złożem filtracyjnym i doregulowanie układu potrzeba na początku cyklu filtracyjnego.
Układy automatycznej regulacji pracą filtrów otwartych na współczesnych Stacjach Uzdatniania Wody polegają na wykorzystaniu:
-
sprzężonego automatycznie układu: sonda ultradźwiękowa mierząca poziom wody nad złożem i przepustnica bądź zasuwa z napędem elektrycznym,
-
automatyczne zawory regulacyjne montowane na rurociągu wody uzdatnionej,
Częściej spotyka się pierwsze z rozwiązań, choć doświadczenia na różnych wodociągach pokazują, że nie zawsze układ tego typu, mimo pozornej prostoty spełnia swoje zadanie, zaś regulacja odbywa się w sposób chaotyczny i niedopuszczalny z technologicznego punktu widzenia (sprzyjający zrywaniu zawiesin i zapowietrzaniu filtra).

Poniżej przedstawiono przykładowy układ sterowania oparty o słuszne z automatycznego, a niesłuszne z technologicznego punktu widzenia założenia.
Automatycy wyróżnili następujące poziomy wody w komorze filtra otwartego (nad złożem filtracyjnym)
-
poziom 0,0 cm - poziom odniesienia - poziom w komorze filtracyjnej przyjęty jako optymalny, odpowiadający ok 50 cm słupa wody nad złożem filtracyjnym,
-
poziom alarmowy maksymalny: (+) 8,0 cm - poziom przy którym włącza się sygnał dźwiękowy - informujący o nadmiernym napełnieniu komory filtracyjnej wodą (przy którym istnieje niebezpieczeństwo przelania wody do przelewu) - wymagający ręcznej korekty przez pracownika (otwarcia przepustnicy na rurociągu wody uzdatnionej),
-
poziom alarmowy minimalny: (-) 8,0 cm - poziom przy którym włącza się sygnał dźwiękowy informujący o nadmiernym opróżnieniu komory filtracyjnej z wody (przy którym istnieje niebezpieczeństwo osuszenia złoża filtracyjnego - obniżenia zwierciadła poniżej poziomu złoża filtracyjnego), wymagający również ręcznej korekty przez pracownika (przymknięcia przepustnicy na rurociągu wody uzdatnionej),
-
poziom pośredni 2,0 cm - poziom powyżej którego sygnały ze sondy ultradźwiękowej przetworzone w sterowniku otwierają przepustnicę regulacyjną,
-
poziom pośredni - 2,0 cm - poziom poniżej którego, sygnały ze sondy ultradźwiękowej przetworzone w sterowniku przymykają przepustnicę regulacyjną,
-
przedział <-2,0 - 2,0> cm - przedział martwy, w którym sygnały z echosondy nie powodują żadnych reakcji przepustnicy.
Dodatkowo założono:
-
czas trwania impulsu zamykającego lub otwierającego przepustnicę - wstępnie wprowadzono 2,0 s (możliwość zmian w szerokim zakresie czasowym: od 0,1 s)
-
czas pomiędzy dwoma odczytami poziomu wody nad złożem - (czas pomiędzy kolejnymi impulsami otwierającymi lub zamykającymi przepustnicę na wodzie uzdatnionej) - wstępnie ustalony na 30 s (możliwość zmiany w szerokim zakresie czasowym od 0,5 s).
Najpoważniejszy problem we właściwej konfiguracji układu wiązał się z tym, że układ regulacji na sztywno podawał impulsy na przepustnicę gdy poziom wody przekraczał wartości martwe (w przykładzie powyżej 2,0 cm i poniżej -2,0 cm). Nawet jeśli został osiągnięty punkt przegięcia (przykładowo: wzrastający poziom wody nad filtrem zacznie spadać, lub odwrotnie - malejący poziom wody nad złożem zacznie rosnąć) sterownik nadal podawał sygnał na przepustnicę, jeśli tylko poziom przekraczał wartość graniczną przedziału martwego. W wyniku czego w sytuacji, w której przy przymkniętej przepustnicy (napływ większy niż odpływ) poziom wody na filtrze podnosił się, po osiągnięciu stanu granicznego (poziom pośredni 2,0 cm) sterownik zaczynał otwierać przepustnicę, osiągając stan w którym napływ jest równy odpływowi (stan docelowy) - wyhamowując podnoszenie się zwierciadła wody nad złożem, ale ze względu na fakt, że poziom wody nadal przekracza wartość pośrednią (wstępnie przyjętą na poziomie 2,0 cm), sterownik dalej podawał sygnał otwierania przepustnicy - w wyniku czego odpływ ulegał zwiększeniu, a zwierciadło coraz szybciej się obniżało - układ przyspieszał. Zwierciadło wody obniżając się wchodziło w strefę martwą <-2,0 do 2,0 cm> w której nie są wykonywane ruchy na przepustnicy, po czym spadało poniżej -2,0 cm, kiedy to sterownik podawał już sygnały na przepustnicę powodujące jej stopniowe zamykanie. W pewnym momencie znowu został osiągnięty stan równowagi w którym dopływ równa się odpływowi, jednak z uwagi na fakt, iż poziom wody wykraczał poza strefę martwą (poniżej -2,0 cm) cały czas był podawany sygnał otwierający przepustnicę i znowu przekroczony został stan równowagi - układ się rozkręca, przepływ mocno zwiększa. Przykładowy przebieg zwierciadła wody nad złożem filtracyjnym zgodnie z zamieszczonym opisem przedstawiono na wykresie 1 (poniżej), na którym zaznaczono na osi Y poziom zwierciadła nad złożem filtracyjnym, na osi X czas w [s]
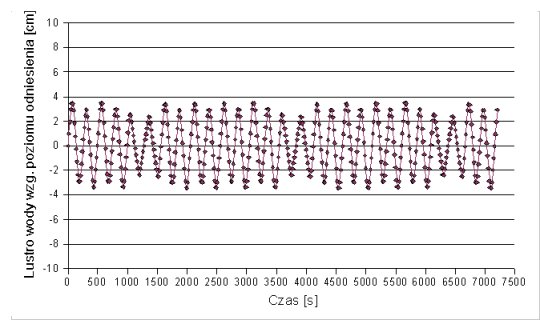
Jak widać wahania zwierciadła wody nad złożem są bardzo duże. Co więcej odpowiadają one wahaniom przepływu w zakresie: 30,0 m3/h - 180,0 m3/h. Wywoływało to znaczne zakłócenia pracy filtrów rzutując bezpośrednio na zrywanie zawiesin żelazowych zatrzymanych w cyklu filtracyjnym (zagadnienie zrywania zawiesin z filtrów ciśnieniowych zostało opisane w jednym z wcześniejszych artykułów).
I mimo, iż dla automatyków układ regulacji spełniał swoje zadanie (utrzymywał poziom wody w zadanym przedziale) technologicznie był nie do przyjęcia.
Wprowadzone korekty w programie, polegające jedynie na tym, że po osiągnięciu punktu przegięcia trendu zmiany zwierciadła nad złożem filtracyjnym, sterownik nie podawał impulsów na przepustnicę wyeliminowały efekt „wahadła" - związany z widoczną na wykresie 1 histerezą.
Przebieg zmian zwierciadła nad złożem filtracyjnym po wprowadzonych zmianach w układzie automatycznego sterowania pracą SUW przedstawiono na wykresie 2.
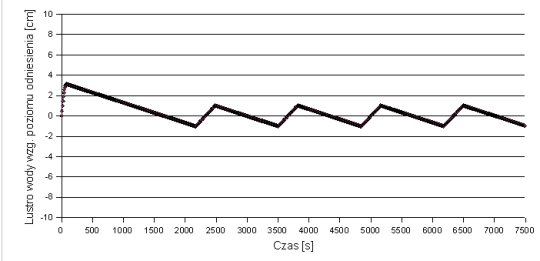
Jak widać niewielka tylko modyfikacja programu sterującego, niewiążąca się z praktycznie żadnymi kosztami spowodowała znaczną stabilizację pracy filtra. Co więcej, manewrując nieco czasem trwania impulsu otwierającego przepustnicę, czy częstotliwością testowania echosondą wysokości zwierciadła wody nad złożem można dojść do takiego stanu regulacji, w którym układ będzie jedynie lekko korygował zmiany zwierciadła spowodowane kolmatacją złoża filtracyjnego, lub załączaniem czy wyłączaniem pomp głębinowych.
Po wprowadzeniu zmian, filtry zaczęły uzyskiwać bardzo niskie wartości stężenia przede wszystkim żelaza w wodzie uzdatnionej, które nie migrowało już do odpływu na skutek gwałtownych wahań przepływu.
Za i przeciw stosowania automatycznych zaworów regulacyjnych zostanie opisane w jednym z kolejnych artykułów w cyklu.
Zapraszamy do komentowania artykułu i podzielenia się swoimi doświadczeniami na forum.
Autor: Łukasz Weber